
Content
- 3D LiDAR hardware setup
- connect to go1 nx
- run built-in 3D LiDAR SLAM package
- build 3D LiDAR SLAM package in PC
3D LiDAR hardware setup
Install LiDAR on Go1,  fix the lidar on go1 using this rack
fix the lidar on go1 using this rack
 test go1 stability for holding lidar
test go1 stability for holding lidar
connect to go1 nx
The following uses go1’s local network
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
# connect to go1's local WiFi network "GO1AXXXXX", pwd: 00000000
# In a terminal A, ssh togo1's network, pwd: 123
ssh pi@192.168.12.1
# connect to nx, pwd: 123
ssh unitree@192.168.123.15
# set ROS_MASTER_URI, ROS_IP in go1 (only set it for the first time)
echo 'export ROS_MASTER_URI=http://192.168.123.15:11311' >> ~/.bashrc
echo 'export ROS_IP=192.168.123.15' >> ~/.bashrc
# in PC, set ROS_MASTER_URI, ROS_IP in go1
echo 'export ROS_MASTER_URI=http://192.168.123.15:11311' >> ~/.bashrc
echo 'export ROS_IP=192.168.21.241' >> ~/.bashrc
# you may have to check the ip address when using a new computer by:
ifconfig
run built-in 3D LiDAR SLAM package
Now we can implement the 3D LiDAR SLAM
In terminal A,
1
2
3
cd UnitreeSLAM/unitree_slam_3d
source ./devel/setup.bash
roslaunch start build_map.launch map_name:=your_map_name
Open a terminal in PC,
1
rviz rviz
Visualize the map and pointcloud by clicking “Add” at the left bottom.
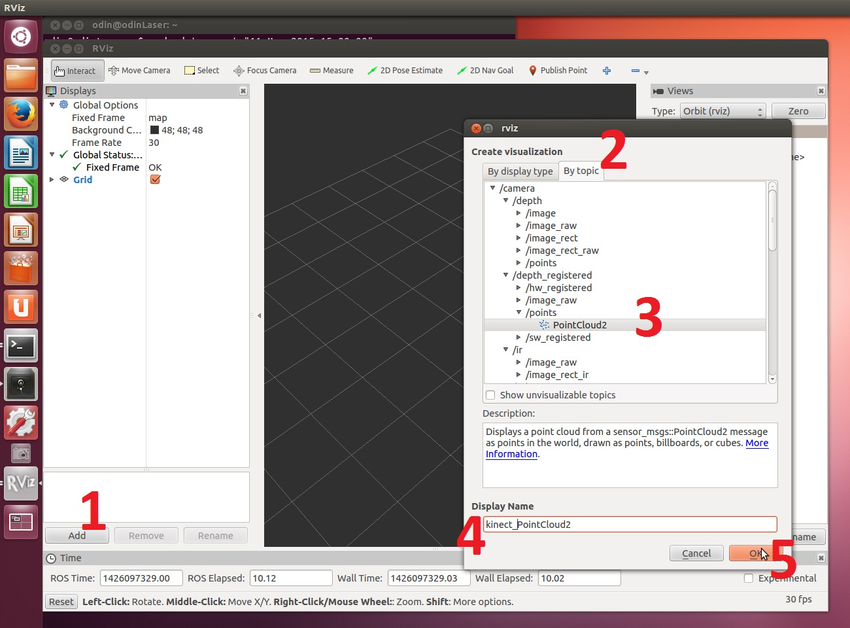 Visualize ROS topics
Visualize ROS topics
Now control go1 with either joystick or keyboard.
reference video tutorial
manual control + GroundingDINO
Here we show how to do joystick control and real-time open-vocabulary object detection.
In PC, open a terminal, ssh into unitree@192.168.123.15, and run a ros node for opening the realsense camera:
1
roslaunch realsense2_camera rs_camera.launch
In PC, open another terminal, and source the groundingdino package:
1
2
3
cd /path/to/catkin_ws
source /opt/ros/noetic/setup.bash
source ./devel/setup.bash
In case you have not set up the ROS_MASTER_URI and ROS_IP:
1
2
export ROS_MASTER_URI=http://192.168.123.15:11311
export ROS_IP=192.168.12.175 # ifconfig to check IP
Now we run the groundingdino detection:
1
roslaunch tmrrt_exploration groundingdino.launch
You can change the TEXT PROMPT parameter in groundingdino_realsense.py
build 3D LiDAR SLAM package in PC
Download 3D LiDAR SLAM package: https://github.com/YESAndy/yesandy.github.io/blob/main/_data/patroldog_ws_pure.zip
For gtsam build and installation, download version 4.0.3 instead of 4.0.2,
useful links
see guide: https://github.com/YESAndy/yesandy.github.io/blob/main/_data/3D%20Laser%20SLAM%20Development%20Guide-Go1-V1.0.pdf https://github.com/YESAndy/yesandy.github.io/blob/main/_data/go1%20rshelios16p-3D-SLAM.pdf